About
Welcome! I am a PhD student in the Microrobotics lab (Advisor: Prof. Sarah Bergbreiter) at Carnegie Mellon University. My research focuses on understanding and using latch-mediation in small-scale jumping robots. This is a part of a Multidisciplinary Research Initiative (MURI) focusing on the interdisciplinary area of impulsive systems (both natural and synthetic) that has led to the establishment of the “Latch Mediated Spring Actuation (LaMSA)” framework for analyzing such ultra-fast systems in both biology and engineering. I have a broad interest in the areas of bio-inspired robotics, micro-scale and insect-scale robotics with particular focus on actuation, sensing and system integration strategies at these smaller scales.

Education
Carnegie Mellon University, Pittsburgh, PA
2018 - Current
GPA: 3.95/4.0
Dissertation: Role of latches in latch-mediated spring actuation systems for high-acceleration movements in small-scale robots
NC State University, Raleigh, NC
2015 - 2017
GPA: 4.0/4.0
Thesis: Design, modeling and simulation of the dynamics and control, of an autonomous underwater vehicle equipped with hydrokinetic turbines for harvestig energy from ocean currents
Birla Institute of Technology & Science, Pilani (India)
2010 - 2014
GPA: 8.31/10
Skills
Programming Languages
Design/Analysis Tools
Rapid Prototyping Methods
Research

Latch as a control tool
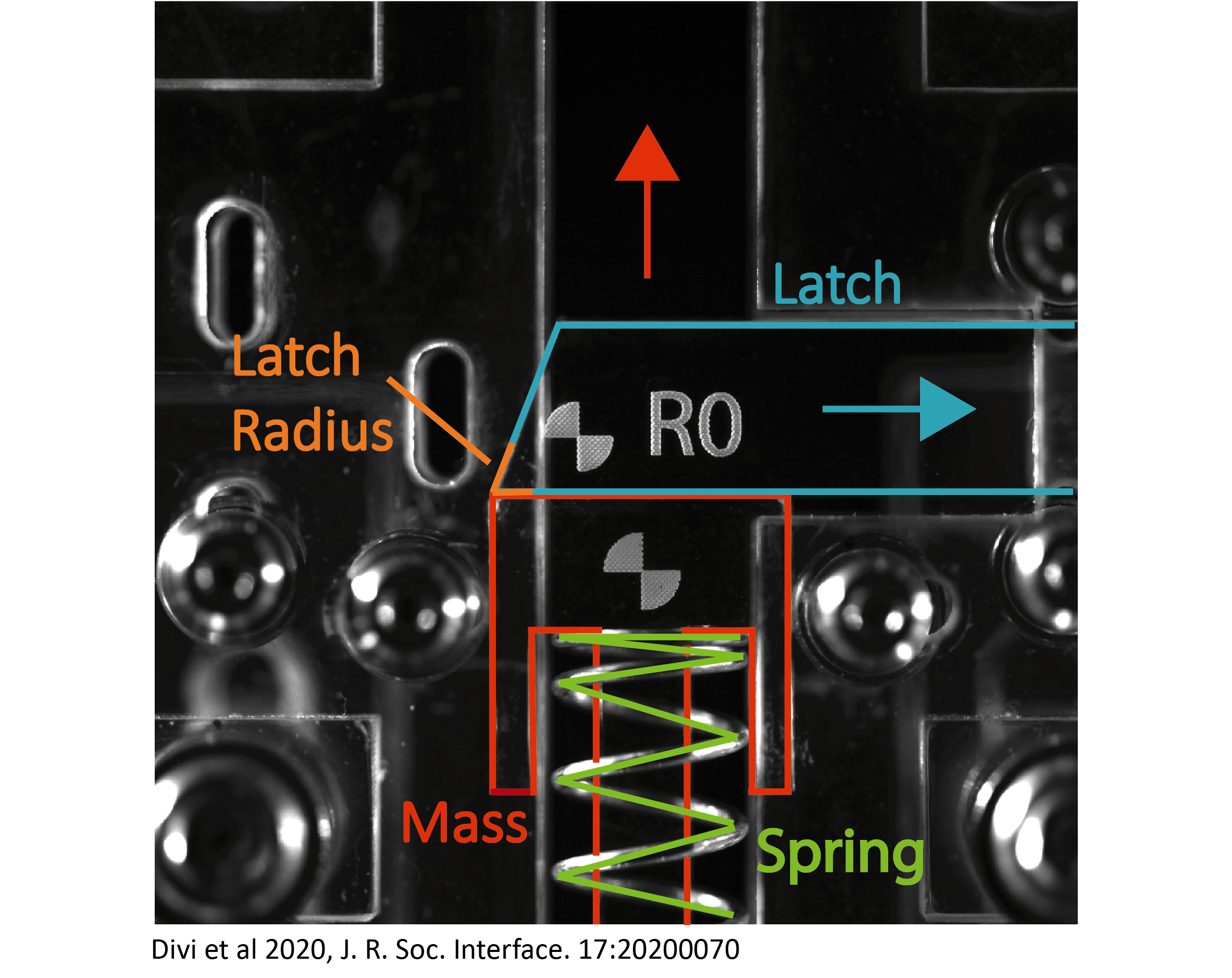
This project is aimed at exploring the influence of non-ideal latch parameters on the energy output of a Latch-mediated spring actuation (LaMSA) system. Through a combination of both modeling (using a reduced-order model) and physical experiments, we show that the latch can be used as a mediating tool to obtain a varied energy output. This gives rise to the implication that for a fixed spring potential energy, a variable energy output can be obtained, thereby making the latch a tool for feedforward or open-loop control in impulsive systems.
Tuning LaMSA jumpers to compliant environments
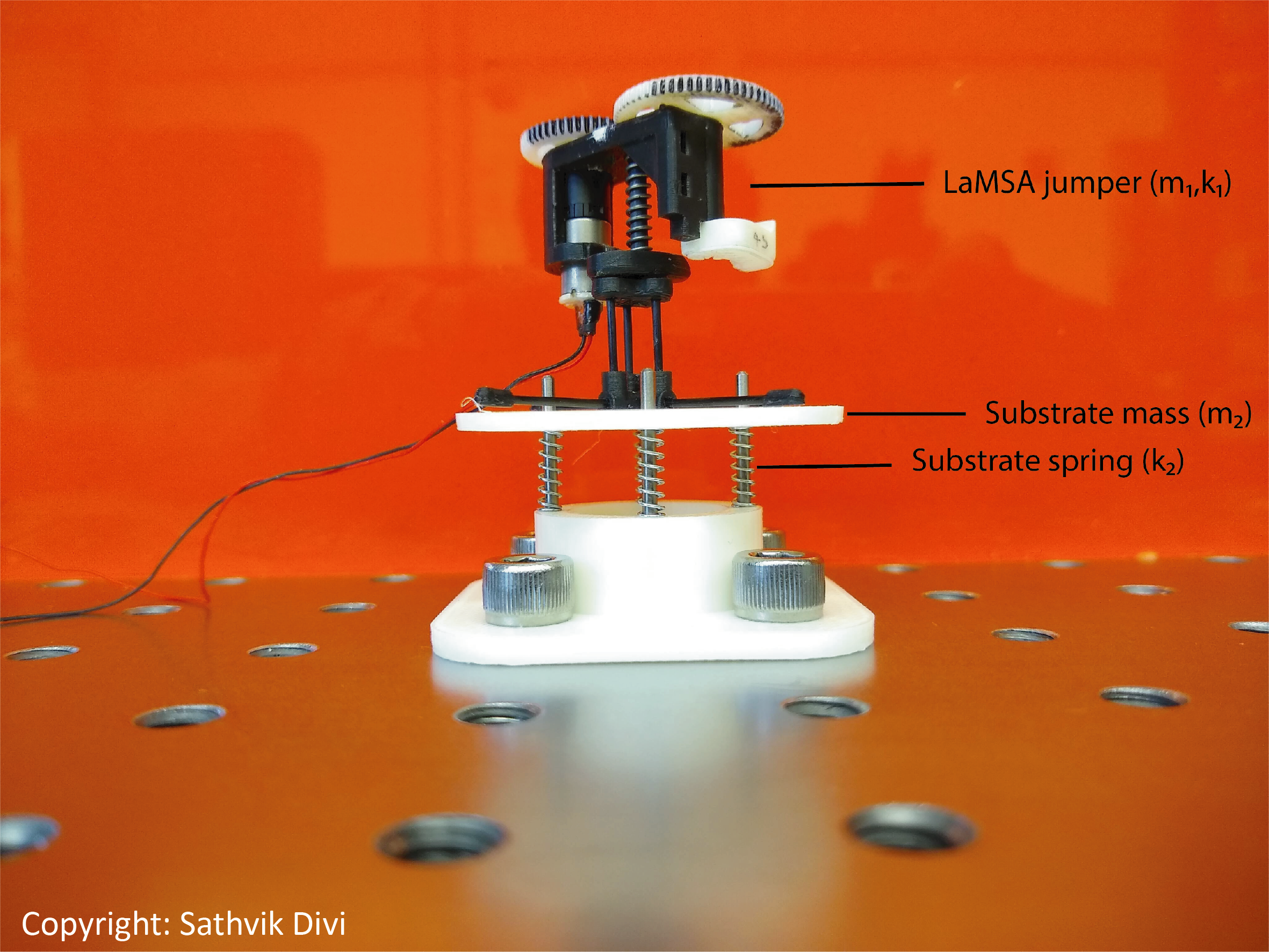
The goal of this project is understand the tuning relationship between LaMSAs and their operating environments, particularly compliant ones. Through a combination of both modeling (using a reduced-order model) and physical experiments, we uncover the tuning relationship between these LaMSAs, their latch parameters and compliant environments. We show that latches play a crucial role in enabling LaMSAs adapt to the compliance in their operating environment.

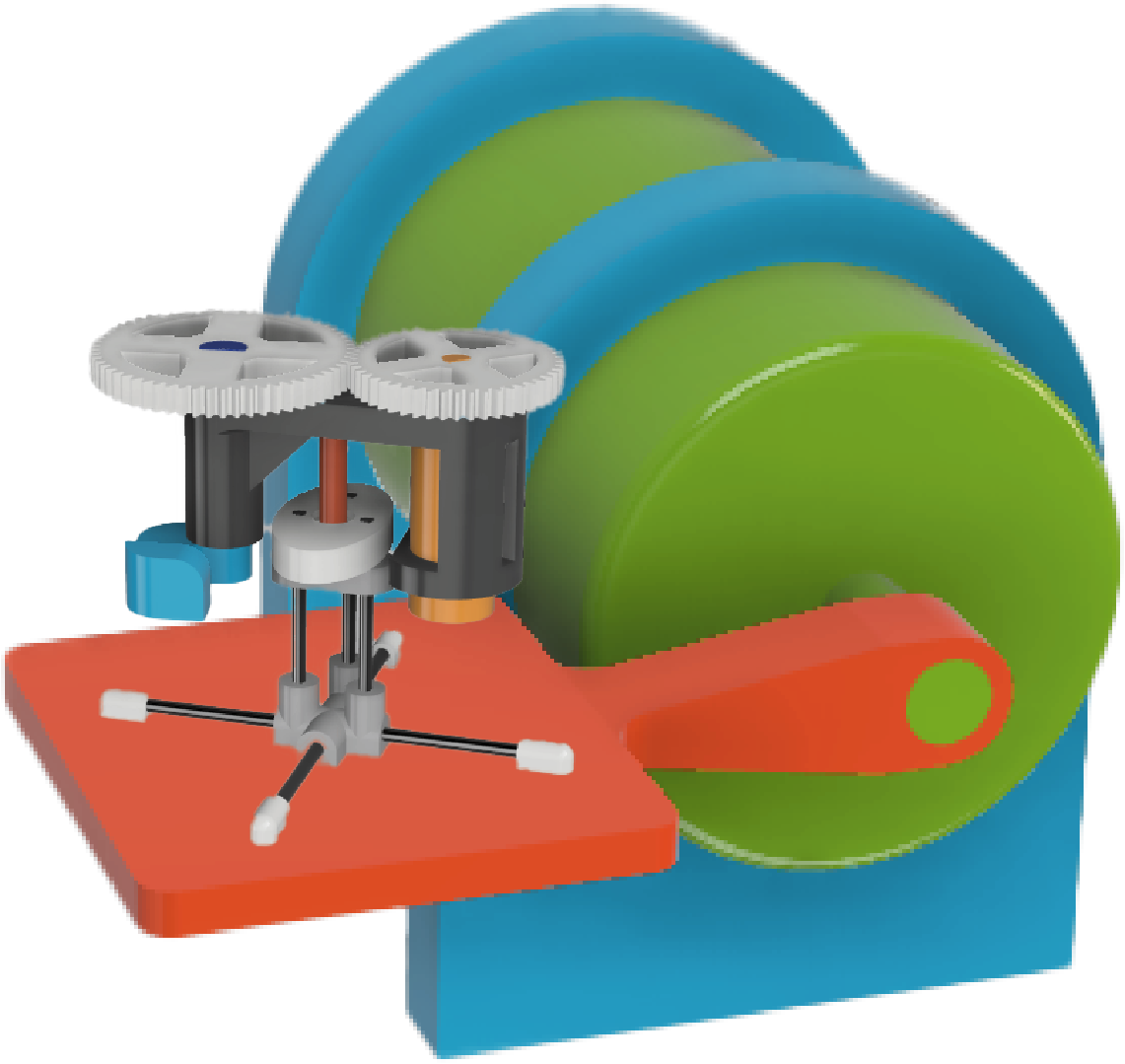


Programmable substrate to study LaMSAs & their environmental interactions
The goal of this project is to build a virtual substrate device into which the desired environmental interactions can be programmed. Using this device, the goal is to study the nature of interactions between LaMSA jumpers and environments for a wide variety of substrate and jumper parameters.
Publications & Talks
Journal
Divi, S., Reynaga, C.M., Azizi E., and Bergbreiter, S., "Adapting small jumping robots to compliant environments" [In Prep, Science Robotics]
Divi, S., Foong, H.M., St. Pierre, R., and Bergbreiter, S., "Latch-based control of jump performance in small-scale jumping robots with fixed spring compression" [In Prep, Bioinspiration & Biomimetics]
Olberding, J.P., Hyun, N.P., De, A., Divi, S., Liang, X., Thomas, E., St. Pierre, R., Steinhardt, E., Jorge, J., Longo, S.J., Cox, S., Mendoza, E., Sutton, G.P., Azizi, E., Crosby, A.J., Bergbreiter, S., Wood, R.J., and Patek, S.N., "Tunable elastic materials and latch dynamics achieve control objectives in ultrafast systems" [Submitted to Proceedings of National Academy of Sciences]
Divi, S., Ma, X., Ilton, M., St. Pierre, R., Eslami, B., Patek, S.N., and Bergbreiter, S., "Latch-based control of energy output in spring actuated systems", Journal of the Royal Society Interface vol. 17, July 2020
Tandon, S., Divi, S., Muglia, M., Vermillion, C., Mazzoleni, A., "Modeling and dynamic analysis of a mobile underwater turbine system for harvesting marine hydrokinetic enregy", Ocean Engineering vol. 187, July 2019
Conference Presentations & Proceedings
Krishnan, T., Divi, S., St. Pierre, R., Bergbreiter, S., and Ilton, M., "Performance trade-offs in a latch-mediated spring actuated robotic jumper", Bulletin of the American Physical Society, Chicago IL, March 14-18 2022
Divi, S., Ma, X., Ilton M., and Bergbreiter, S., "Tuning of impulsive mechanisms to their environment", Bulletin of the American Physical Society, Boston MA, March 4-8 2019
Ilton, M., Cook, A., Heller, N., Patek, S.N., Crosby, A., Bergbreiter, S., Azizi, E., Sutton, G., Longo, S., Divi, S., Reynaga, C., Olberding, J., St. Pierre, R., Cox, S., "Modeling the physical constraints of latch mediated spring actuated systems", Bulletin of the American Physical Society, Boston MA, March 4-8 2019
Workshop Talks
Divi, S., and Bergbreiter, S., "Power modulation of ultrafast movements through latches", IEEE International Conference on Robotics and Automation, Workshop on Energy storage and delivery in robotic systems, Philadelphia PA, May 27, 2022
Divi, S., and Bergbreiter, S., "Latches: Unsung heroes of spring actuation", IEEE International Conference on Robotics and Automation, Workshop on Impulsive systems: Principles of rapid energy release and applications to unique robot behaviors, Philadelphia PA, May 23, 2022
Divi, S., and St. Pierre, R., "Practical approaches to studying latches", Society of Integrative and Comparative Biology Workshop on Playing with power: mechanisms of energy flow in organismal movement, Tampa FL, January 3, 2019
Project Portfolio
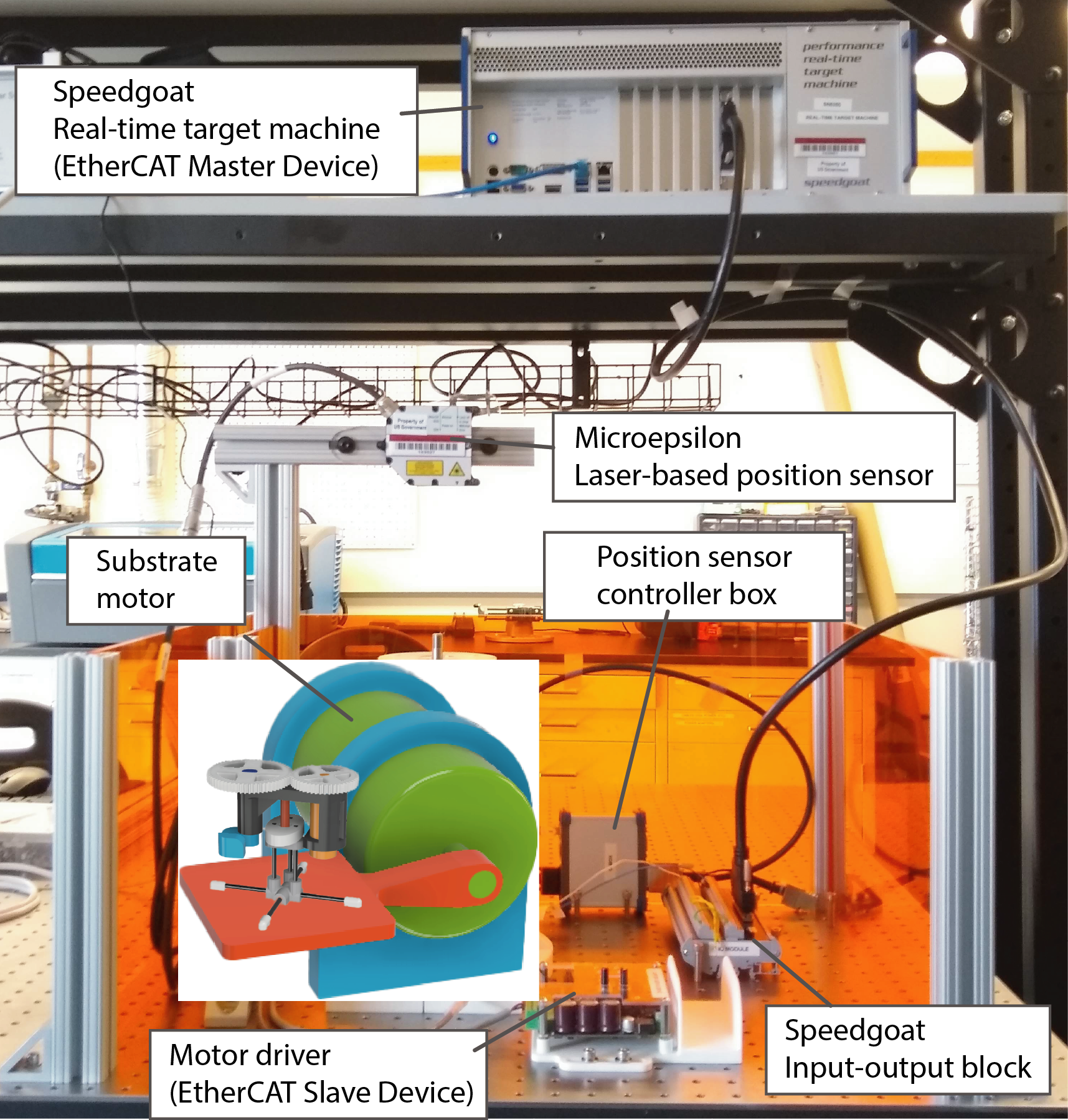
Programmable virtual substrate
Built to study the interactions between small-scale LaMSA jumping robots and different environments through programmed inertial, elastic, and dissipative effects.
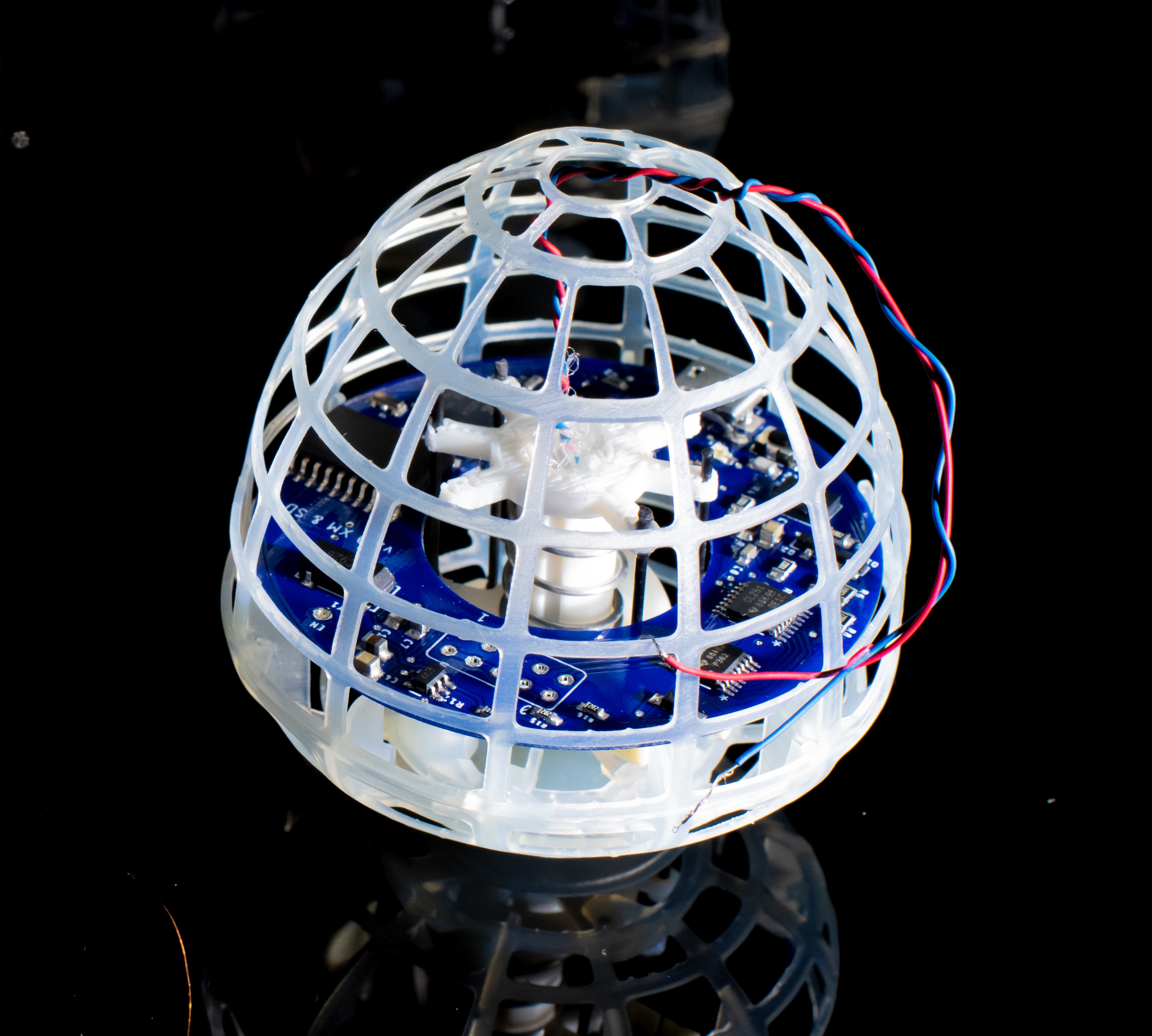
Self-balancing spheroid jumper
A prototype with LaMSA jumping mechanism integrated with a spheroidal shell for passive balancing. Built as a part of the course: 16-845 Insects & Robots.
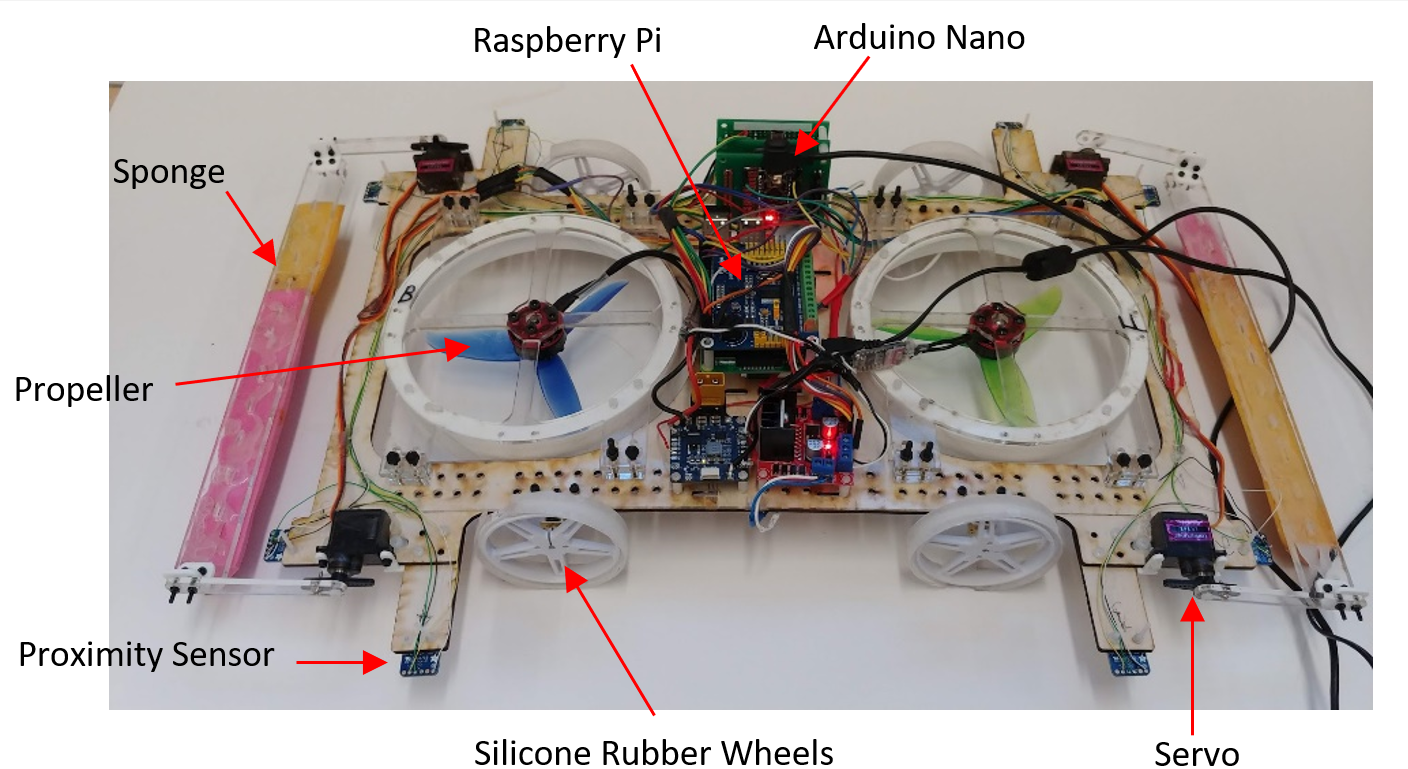
Geickobot
An autonomous window washing robot capabale of climbing and cleaning vertical surfaces. Built as a part of the course: 24-778 Mechatronics.
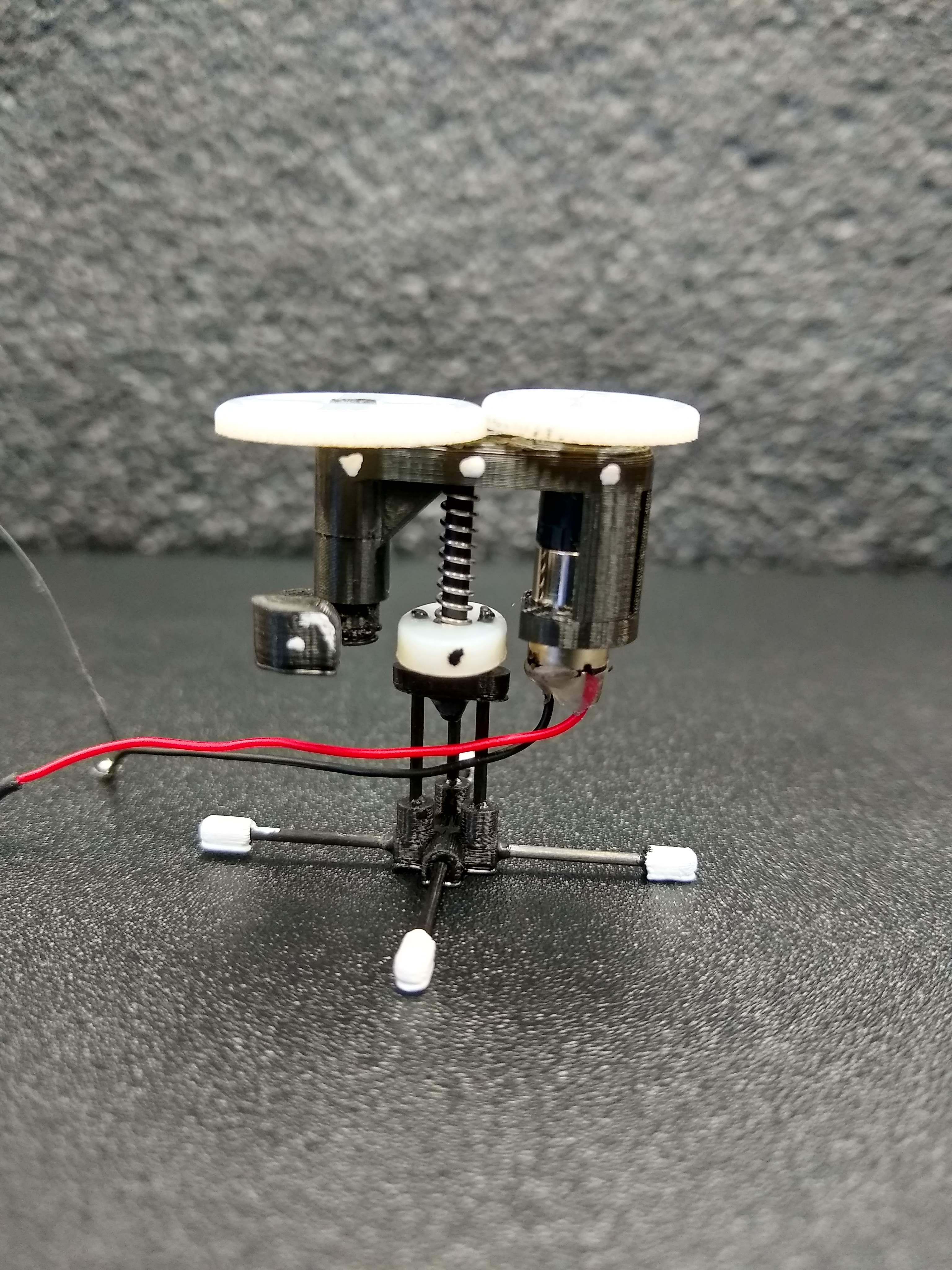
5g LaMSA jumping robot
A 5g Latch-mediated spring actuated (LaMSA) modular jumping robot built for studying latch-mediated spring actuation with space for on-board battery (power autonomy).
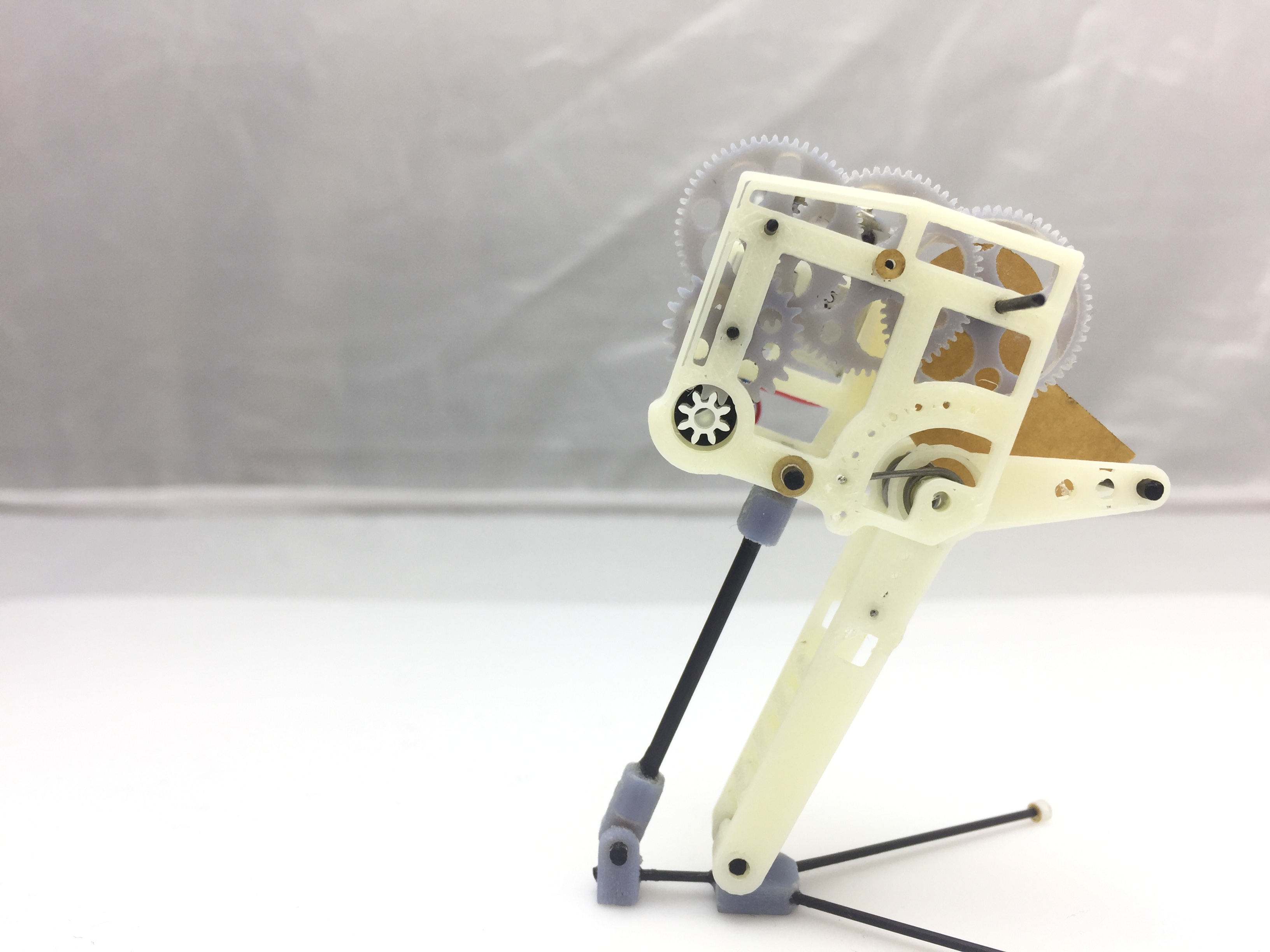
EPFL-inspired 8g jumping robot
8g jumping robot (inspired from "EPFL-inspired 7g jumping robot" EPFL jumping robot) with power autonomy, used for studying the role of latch-mediation in spring-actuated jumping robots.
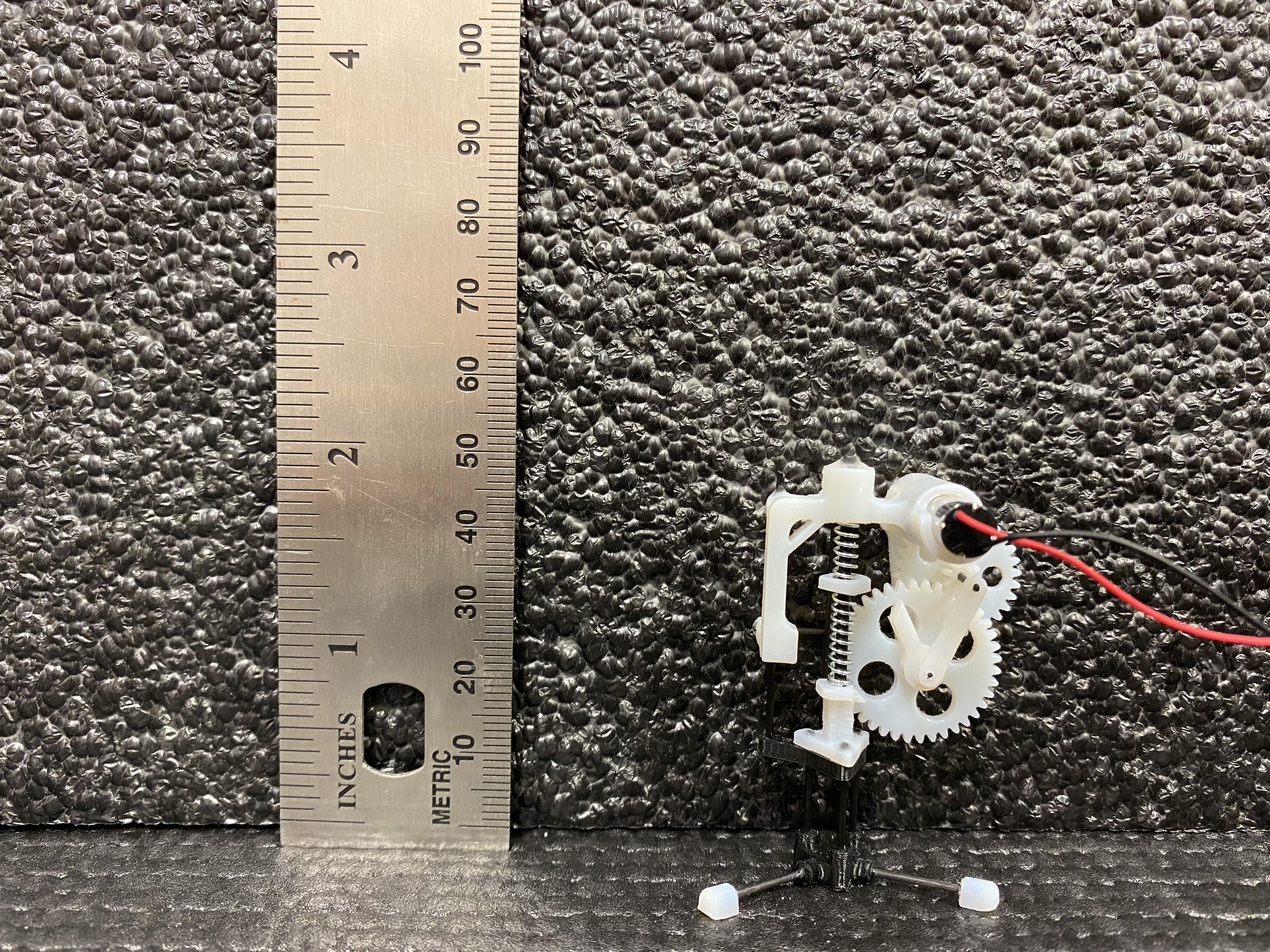
4g LaMSA jumper
A 4g Latch-mediated spring actuated (LaMSA) jumping mechanism with modular design that enables the study of different latch profiles.